您现在的位置是: 首页 > 车型对比 车型对比
北京车安捷智能防撞,汽车防撞系统车安捷可以在超速的时候探测到附近的车辆吗为什么
tamoadmin 2024-05-24 人已围观
简介1.泊车雷达防撞辅助系统的原理与维修 自动泊车原理2.有谁用过汽车BSD盲区检测系统?哪有装的?3.ACC在汽车上表示什么4.汽车主动安全技术有哪些方面5.汽车被安装GPS定位有仪器能扫描到在什么位置吗再也不怕油门当刹车,你知道车子ABE自动刹车系统的优缺点是什么吗?自动紧急制动系统,简称AEB,不同品牌的叫法也不同,像是CBMSFCMPCS等等,但主要的原理都是一样的,一般都是通过车辆前方的毫米
1.泊车雷达防撞辅助系统的原理与维修 自动泊车原理
2.有谁用过汽车BSD盲区检测系统?哪有装的?
3.ACC在汽车上表示什么
4.汽车主动安全技术有哪些方面
5.汽车被安装GPS定位有仪器能扫描到在什么位置吗
再也不怕油门当刹车,你知道车子ABE自动刹车系统的优缺点是什么吗?
自动紧急制动系统,简称AEB,不同品牌的叫法也不同,像是CBMSFCMPCS等等,但主要的原理都是一样的,一般都是通过车辆前方的毫米波雷达和摄像头来感知前方的路况,如果遇到障碍物,则根据不同的速度和距离发出警报,如果碰撞不可避免,或者是驾驶员没有采取刹车的举动,系统就会自动的介入进行紧急制动,从而避免碰撞,或者是在一定程度上减少碰撞时的速率。
像很多高科技一样,自动刹车系统十多年前就已经出现在豪华车上,直到近几年才慢慢的在家用车上普及。AEB是能够在紧急情况息发挥重要作用的主动安全配置,但是AEB并非每时每刻都在工作,也不是100%能够避免碰撞,从技术的角度来说,仍然存在一些天生的缺陷。事实上,很多车企已经在说明书中给出了比较全面的信息,大致的意思,就是提醒车主AE,并不能完全代替驾驶员,在开车的过程中,我们司机仍然需要保持注意力,做到安全驾驶。目前市面上AAB系统的监测方式,主要分为雷达和摄像头两个类型。雷达版本又分为毫米波雷达和激光雷达,毫米波雷达是工作在毫米波波段的探测雷达,而激光雷达发射的是激光,它是属于光学元件。这两种雷达监测在雨雾、失血等高潮时的环境都会产生一定的衰减,而且要时刻保持发射单元和接收单元前方两个开口的清洁程度。
摄像头版本利用的是图像识别技术,特别是在识别行人、车辆等复杂目标方面有着得天独厚的优势,但它也有一定的缺陷,可识别的行人,至少要有80厘米的身高,并且不能携带较大的物体,可识别的骑行人员要有轻细的身形和自行车的轮廓,自行车还必须配备红色的反光镜,且至少高于地面70厘米。另外图像识别技术,它是基于算法和数据库的,对于一些奇葩的物体,或者是数据库中没有的物体,就会出现无法识别的情况。
另外有一些车型采用了雷达和摄像头两种方式的混合版,虽然听上去比较稳妥可靠,但根本的问题还是没有解决。此外,由于技术的限制,不管是什么版本都有自己的工作上线速度和下线速度,不少车型的AAB系统,在30码以下的效果非常的好,超过30码之后,系统漏判误判的情况就会经常的出现。
其次,由于存在盲区,车辆在拐弯的时候,A ABB基本就会失效。在很多汽车测试中,我们会发现,虽然有的时候不能避免碰撞,但大多数的车型,都会采取刹车制动,所以说,虽然a ABB不能避每一次的碰撞,但确实,是可以减少事故的发生几率和严重性。其实a ABB系统,就像我们买的意外保险一样,没事的时候,没有什么概念,但危机时就能派上用场,用到一次就知道它的价值在哪里了。
欧盟,已经将AEB列为2021年新车的标配功能,相信随着技术的发展和政策的跟进,A将会是保障我们新车安全最重要的主动安全配置。
泊车雷达防撞辅助系统的原理与维修 自动泊车原理
替你抄来的--
现行的检测器种类有很多,包括磁感应检测器,波频车辆检测器,视频检测器等。根据安装方式可以分为埋设式和悬挂式。
(1)磁感应检测器(多为埋设式检测系统)
环形线圈检测器是传统的交通检测器,是目前世界上用量最大的一种检测设备。车辆通过埋设在路面下的环形线圈,引起线圈磁场的变化,检测器据此计算出车辆的流量、速度、时间占有率和长度等交通参数,并上传给中央控制系统,以满足交通控制系统的需要。此种方法技术成熟,易于掌握,并有成本较低的优点。
这种方法也有以下缺点:a. 线圈在安装或维护时必须直接埋入车道,这样交通会暂时受到阻碍。b. 埋置线圈的切缝软化了路面,容易使路面受损,尤其是在有信号控制的十字路口,车辆启动或者制动时损坏可能会更加严重。c. 感应线圈易受冰冻、路基下沉、盐碱等自然环境的影响。d. 感应线圈由于自身的测量原理所限制,当车流拥堵,车间距小于3m的时候,其检测精度大幅度降低,甚至无法检测。
(2)波频车辆检测器(多为悬挂式检测系统)
波频车辆检测器是以微波、超声波和红外线等对车辆发射电磁波产生感应的检测器,这里主要介绍微波检测器(RTMS),它是一种价格低、性能优越的交通检测器,可广泛应用于城市道路和高速公路的交通信息检测。
RTMS的工作方式是:采用侧挂式,在扇形区域内发射连续的低功率调制微波,并在路面上留下一条长长的投影。RTMS以2米为一“层”,将投影分割为32层。用户可将检测区域定义为一层或多层。RTMS根据被检测目标返回的回波,测算出目标的交通信息,每隔一段时间通过RS-232向控制中心发送。它的车速检测原理是:根据特定区域的所有车型假定一个固定的车长,通过感应投影区域内的车辆的进入与离开经历的时间来计算车速。一台RTMS侧挂可同时检测8个车道的车流量、道路占有率和车速。
RTMS的测量方式在车型单一,车流稳定,车速分布均匀的道路上准确度较高,但是在车流拥堵以及大型车较多、车型分布不均匀的路段,由于遮挡,测量精度会受到比较大的影响。另外,微波检测器要求离最近车道有3m的空间,如要检测8车道,离最近车道也需要7-9m的距离而且安装高度达到要求。因此,在桥梁、立交、高架路的安装会受到限制,安装困难,价格也比较昂贵。
(3)视频检测器
视频检测器是通过视频摄像机作传感器,在视频范围内设置虚拟线圈,即检测区,车辆进入检测区时使背景灰度值发生变化,从而得知车辆的存在,并以此检测车辆的流量和速度。检测器可安装在车道的上方和侧面,与传统的交通信息采集技术相比,交通视频检测技术可提供现场的视频图像,可根据需要移动检测线圈,有着直观可靠,安装调试维护方便,价格便宜等优点,缺点是容易受恶劣天气、灯光、阴影等环境因素的影响,汽车的动态阴影也会带来干扰。
有谁用过汽车BSD盲区检测系统?哪有装的?
轿车上目前装备的泊车防撞辅助系统分为两个技术层次,普通级的是泊车雷达蜂鸣系统,较高级的是泊车影像系统。本文主要对泊车雷达蜂鸥系统进行专门的介绍。 轿车装备的泊车雷达蜂鸣系统又称为“避障系统”、“驻车距离报警系统”,其实际上是一个范围测定系统。该系统具有两方面功能,一是作为倒车的辅助安全装置,为驾驶人提示汽车后方还有多少空间可以利用;二是作为驾驶人视野的增强装置,能够协助驾驶人驻车和调整车位。
一、泊车雷达蜂鸣系统的工作原理
泊车雷达蜂鸣系统借助前、后保险杠上的超声波传感器,检测泊车时汽车与障碍物之间的距离。由雷达传感器发出和接收超声波,电子控制单元(见图1中的J446)利用发送和接收到的超声波计算汽车前后方与障碍物之间的距离。如果汽车接近障碍物,蜂鸣器便发出断续的警报声。汽车前后部与障碍物的距离越靠近,警报声越短促。若汽车前后部与障碍物极其接近,蜂鸣器会发出持续的警报声;若汽车前后部继续靠近障碍物,超出了设定的范围,则系统无法探测障碍物。
轿车泊车雷达防撞辅助系统采用的探测装置是收发一体式超声波传感器(即雷达传感器,俗称“探头”),它是一种超声波换能器。超声波传感器的工作原理是基于压电材料的压电效应。当探头的压电晶片被施加超声频交变电信号时,压电晶片产生变形,并发射出超声波;当超声波遇到障碍物,被反射回来,反射回来的超声信号挤压压电晶片,并产生超声频的电信号,因此探头又能够探知回波。总之,超声波传感器既能发射超声波,也能接收超声波。
二、泊车雷达蜂鸣系统的工作特点及探测范围
以通用别克君威轿车的倒车雷达防撞系统为例加以说明。该车型的倒车雷达系统由安装在后保险杠上的4个雷达传感器、安装在后车门装饰衬板内的倒车防撞控制模块、车顶上的报警显示器和仪表盘上的声音控制开关等组成。当雷达传感器探测到汽车后方1200m距离内存在障碍物时,系统进入警戒状态。车顶上的报警显示器和倒车防撞控制模块内的蜂鸣器会发出报警声,提醒驾驶人汽车后方存在障碍物。
1.系统的工作特点
当点火开关置于“RUN”位、变速杆挂入倒挡时,系统便进行自检,然后转入工作状态。自检时,报警显示器上的绿色、**和红色LED指示灯会闪亮一下。如果LED指示灯持续闪烁。表示系统发生了故障。如果指示灯闪亮的时间比平时长,并且伴有蜂鸣器报警声,说明雷达传感器发生了故障。倒车雷达探测到汽车与障碍物的距离越接近,闪亮的LED指示灯越多,蜂鸣器的鸣叫越紧迫。另外,按压仪表盘上声音控制开关,可以控制蜂鸣器的发声。
2.系统的工作范围和条件
倒车雷达避免碰撞系统只在车速低于5km/h时才能正常工作,一般以雷达传感器为基点,左右各60°、上下各45°的圆弧形区间为其探测范围,超出此范围的障碍物可能探测不出来,即出现所谓的探测“盲区”。
3.雷达探测的局限性
对于下列障碍物及场合,雷达传感器可能无法探测或者出现探测不准的现象:
(1)障碍物是尖锐的物体,例如铁丝网、锐角反射体(指小于60°锥形物体);
(2)障碍物是绳索等细小物体;
(3)车辆后部触及棉质、海绵或表面容易吸收声波的材料;
(4)表面积小于25cm2的物体。
而在下列情况下,雷达传感器可能出现错误判断:
(1)轿车在草丛中、沙石路、斜坡路或者凹凸不平的路面行驶时:
(2)雷达传感器表面结冰、粘附了尘土或污物;
(3)雷达传感器周围被物体阻挡,例如贴有装饰物;
(4)受到相同频率(40KHz左右)的超声波杂音、金属声、高压气体排放声的干扰。
总之,雷达测距系统只起防撞辅助作用,驾驶人对于该系统不能过于依赖,泊车时必须注意控制车速,并随时准备制动。
三、泊车雷达蜂鸣系统的检测与维护
以2006大众速腾,迈腾轿车的泊车雷达防撞辅助系统为例加以说明。
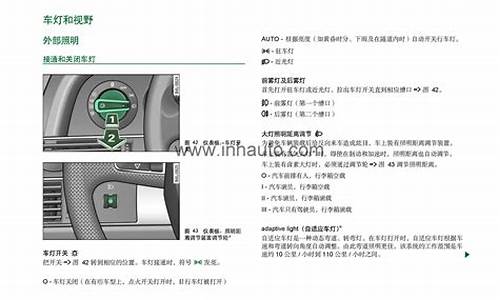
1.泊车雷达系统的开启与关闭
开启泊车雷达报警系统的方法为接通点火开关,挂入倒挡,泊车雷达报警系统即开始工作,此时能够听到声响信号。如果没有声响信号,表示雷达报警系统未开启。
关闭雷达报警系统的方法为一旦变速杆移出倒挡位,泊车雷达报警系统即被关闭。
2.白车雷达系统的检测
连接大众故障诊断仪,进入76-03(执行元件诊断),可以检测几个雷达传感器的性能。还可以检测报警喇叭(H15,见图1)。进入76-08,可以读取测量数据块,其中001组包括:右后外雷达传感器-1(O~255cm)、右后内雷达传感器-2(0~255cm)、左后内雷达传感器3(0~255cm)、左后外雷达传感器-4(0~255cm);002组包括:1/2传感器合成距离值(0~255cm)、2/3传感器合成距离值(0~255cm)、3/4传感器合成距离值(0~255cm);003组包括:右后距离值(0~255cm)、左后距离值(0-255cm)、总合成距离值(0-255cm)。
(注:255cm的距离表示没有检测到障碍物)
3.泊车雷达系统的自适应
连接大众故障诊断仪,进入76―10―01,为调整警报提示音的音量(0~100%);进入76-10-02,为调整报警的灵敏度。
4.泊车雷达报警系统的检修
对于底盘号最后8位为“83020444”之前(不包括本号)的大众迈腾轿车,其前后保险杠上一共安装了8个泊车雷达传感器,都需要加装胶套予以保护,胶套的安装步骤如下:
(1)卸前、后保险杠以及中部通风格栅;
(2)对于喷漆的传感器(前保险杠上2个,后保险杠上4个),将胶套套到传感器上,再用扎带扎紧,紧固后,剪掉扎带多余的部分i
(3)对于镀铬的传感器(在中部通风格栅上,有2个),先去除胶套预留孔上的胶皮,再套到传感器上,并用扎带扎紧,紧固后,剪掉扎带多余的部分;
(4)装回前、后保险杠和中部通风格栅。
四、根据蜂鸣器鸣响规律判断倒车雷达故障
一辆北京现代索纳塔2.0轿车,行驶里程9.4万km,接通点火开关,挂入倒挡后,倒车雷达报警系统的蜂鸣器长鸣不停,而轿车后方并没有障碍物。询问车主得知,该故障是由于发生交通事故。更换了后保险杠之后才出现的。检查4只倒车雷达传感器,未发现异常。为了判断到底哪只倒车雷达失常,进行倒车雷达报警系统的自诊断。拆开该车后备厢左侧装饰板,可以看到倒车雷达控制模块。其侧面有一个自诊断开关,将它拨向左侧(ON位),接通点火开关,将变速杆挂入倒挡,倒车雷达报警系统便进入自诊断状 态。
该车倒车雷达传感器损坏后,蜂鸣器发出报警声的规律是:
(1)左侧雷达传感器发生故障,蜂鸣器发出“哗―哗―哔”的报警声,“哗”声时长50ms,每节中间停顿750ms;
(2)左后雷达传感器发生故障,蜂鸣器发出“哔哔一哔哔一哔哔”的报警声,“哔”声时长50ms,两声“哗”之间停顿50ms,每节中间停顿750ms;
(3)右后雷达传感器发生故障,蜂鸣器发出“哔哔哔一哔哗哔一哗哗哗”的报警声,“哔”声时长50ms,两声“哔”之间停顿50ms,每节中间停顿750ms;
(4)右侧雷达传感器发生故障,蜂鸣器发出“哔哗哔哔―哔哗哗哔―哗哗哗哗”的报警声,“哔”声时长50ms,两声“哗”之间停顿50ms,每节中间停顿750ms;
(5)无故障,蜂鸣器发出300ms的报警声,停顿500ms后,重复300ms的报警声。
对照上述蜂鸣器的呜响规律,确定右侧的倒车雷达失常。拆下后保险杠检查,发现右侧雷达传感器有一根导线在其根部被拉断。由于该导线无法焊接,只得更换右侧雷达传感器总成,故障被排除。五、注意避免周围零件对雷达传感器的影响
一辆奥迪A6 2.8L轿车,行驶里程3万km,驾驶人报修泊车雷达防撞系统异常报警。为了验证故障,将点火开关置于ON位,启动发动机,将变速杆置于R位,发现无论轿车前后有无障碍物,仪表盘中央的雷达报警蜂鸣器都发出连续的“嘟嘟”报警声,只有将变速杆从R位移出,或者断开泊车防撞系统开关,报警声才会停止。
连接故障诊断仪VAS5051,接通点火开关,选择“控制模块”。键八地址码“76”(泊车防撞系统),没有读到故障码。接着读取数据流,将变速杆置于R位,进入08组,读到001显示区(前保险杠4只雷达传感器的测距数值)的数据分别为225cm、30cm、30cm、225cm,中间2个数据明显不正常。于是拆下前保险杠,然后对照电路图,检查线路,没有发现异常。断开中间2只雷达传感器导线侧插接器,读到故障码“01626”和“01627”,分别表示雷达传感器右前中(G252)和左前中(G253)开路或短路至接地。
为了进一步确认上述2只雷达传感器是否真有故障,将前保险杠上的4只雷达传感器的位置换位安装,再读数据流,发现故障依旧。说明这2只雷达传感器没有损坏。进行模拟试验,连接故障诊断仪,接通点火开关,挂倒挡,然后让同事用手由远及近分别对正4只雷达传感器移动,从诊断仪上看出,测距数据会发生变化,说明泊车防撞控制模块是好的。
考虑到该车是负责开路的警车,因工作需要经常变换外部设备,于是检查其附加装置,发现为军用牌照,其牌照架比民用牌照架大。取下前牌照和牌照架,然后试车,故障现象消失了;装上军用牌照和牌照架,故障又出现,说明问题出在牌照架上。将牌照架的两端分别截去5cm,并且将牌照按照前保险杠的弧度整修成拱形,故障彻底排除。从上述排障过程可以看出,故障是由于过大的牌照阻挡了前保险杠中间2只雷达传感器的正常探测。
将上例故障引申开来,对于进口轿车,由于世界各国机动车号牌支架的宽度不相同,所以可能对泊车雷达传感器的探测产生不利影响。如果出现类似上例的故障,可以根据表1的数据,核对或更改泊车防撞辅助系统控制模块的编码,以便与当地机动车号牌的宽度相适应。
ACC在汽车上表示什么
4s店可以安装。
BSD盲区监测预警系统,通过安装在汽车后方保险杠内的两个24GHz毫米波雷达探头,在车辆前向行驶情况下,对车辆两侧的盲区进行不间断探测,当探测到有其他车辆进行盲区范围内。
系统将通过安装在车辆两侧后视镜上的报警指示灯(或者是通过安装在车内两侧的指示灯)以及报警蜂鸣器进行报警提示,从而告知驾驶员何时是并线的最好时机,大幅降低因并线发生的交通事故,达到辅助安全驾驶的目的。
(1)主动预警,当车速超过25km/h,系统开始工作,可根据客户要求定制。如果检测到侧后盲区有车辆,相应侧后视镜内的指示灯将亮起。若这时驾驶员打转向灯向此侧变道,指示灯会闪烁,同时系统会发出报警声,以警示驾驶人员避免侧撞发生。
(2)准确率高,只探测盲区内移动车辆,不对固定物发出警告,采用智能算法自动过滤道路两旁栏杆、树木等停止目标,极大的提高了报警准确率。
(3)安装方便,使用支架方式安装雷达探头,不用打孔,不用破线,采用空中对接线插头,走线简单,如同原装,完美升级,高端大气。
汽车主动安全技术有哪些方面
ACC在汽车上表示自适应巡航控制系统,该系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。
自适应巡航也可称为主动巡航,是一种智能化的自动控制系统,系统包括雷达传感器、数字信号处理器和控制模块。司机设定所希望的车速,系统利用低功率雷达或红外线光束探测前方200m左右的距离,得到前车的确切位置,
如果发现前车减速或监测到新目标,系统就会发送执行信号给发动机或制动系统来降低车速使车辆和前车保持一个安全的行驶距离,当前方道路没车时又会加速恢复到设定的车速,雷达系统会自动监测下一个目标。
自适应巡航控制系统的作用:
在车辆行驶过程中,当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离,以应对在城市中行驶时频繁的停车和起步情况。
扩展资料:
使用自适应巡航控制系统的注意事项:
1、自适应巡航控制并非撞车警告或防撞系统。
2、自适应巡航控制功能不会检测到静止的或缓慢移动的车辆;不会检测到道路上的行人或物体;不会检测到相同车道上迎面而来的汽车。
3、进入或离开公路、交通状况拥堵或在汽车位于弯曲、光滑或非铺装道路上行驶时,请勿使用自适应巡航控制功能。
4、设定的车速及与前车的距离必须与当时的交通状况相适应,驾驶员必须谨慎使用 ACC,因自适应巡航系统(ACC)仅是一种驾驶辅助系统。
百度百科-ACC (自适应巡航控制)
汽车被安装GPS定位有仪器能扫描到在什么位置吗
汽车主动安全技术有以下几个方面:
1、前方碰撞预警系统(FCW)。前方碰撞预警系统会通过激光、雷达或者影像来预判你车前方可能发生的碰撞,并提醒你保持合理的速度。它会通过影像或者声音的方式来提醒你。有的系统还会提醒你可能会撞到行人。
2、自动刹车功能(AEB)。自动刹车的前提是前方碰撞预警系统,毕竟没有后者,前者也无法判断是否应该启动。AEB技术在意识到车辆将可能发生碰撞的时候,会自动启动,助您及时将车刹住。
3、盲区警示系统。这项技术能扫描到驾驶者看不到的盲区,并以影像和声音的方式警示驾驶者周围车辆的情况,告诉驾驶者如果此时更改或者合并车道是十分危险的。
4、车后横越交通警示系统。这个系统会在你倒车入库或者仅倒车时候,向你提示车辆后方的交通情况。有的系统甚至会在将要撞到某个物体时自动刹车。
5、倒车摄像头。当你倒车的时候,这个系统会将车后的实景呈现在中控屏或者后视镜上。有的系统还会根据车辆行驶的轨迹,绘制出车辆的行驶轨迹线。倒车摄像头的功能可以和车后衡越交通警示系统相辅相成。
6、自动远光灯。在适当的条件下(光线较暗时候),这个功能会自动将车辆的近光灯转成远光灯,而后再转换回来。
7、车道保持辅助系统(LKA)。这个功能不仅会当你偏离车道时给予提醒,还会向车辆平稳地输入操纵信号,让车辆回到正确车道内。
8、自适应巡航系统(ACC)。通过雷达、激光或者两者,自适应巡航系统会自动调整你的车辆,使之和你前方的车辆保持足够安全的距离。有的系统甚至会在交通拥堵时,将车辆停下来,等到交通恢复畅通之后,再回到原先的速度。
9、泊车辅助系统。在你进行倒车入库时,这个系统会通过安装在车辆前方、后方或者保险杠上的感应器,来提醒你减速或刹车,否则你将会撞上其它车辆、电线杆、树木或者其它物体。
10、车道偏离预警系统。这个系统会通激光或红外线感应的方式,来提醒你已经偏离了正常轨道。在高速公路或者平坦的路面上工作情况是最佳的。在拥挤或者有大风刮过的路面上,时常会发出错误的信号。
扩展资料:
汽车在不断完善被动安全系统的同时,完善对行人的保护是当今汽车安全的发展趋势。通过数据总线进行系统集成,可以将汽车安全的很多方面,例如防驾驶瞌睡装置、轮胎压力监测报警装置、行人碰撞保护装置集成在一起,提高汽车的安全性能。
未来智能行人保护系统(IPPS)、高级驾驶员辅助系统、保持车道状态系统、夜视系统、高灵敏度雷达传感器和激光雷达技术的应用将大大提高汽车主动安全的水平。欧盟委员会和日本政府已颁布了新法规来保护行人和其他易受伤的道路使用者。
参考资料:
车载GPS有带电池的和不带电池的
带电池的可以放在车辆的任何位置,甚至车辆的底部;
不带电池的GPS设备需要接通车辆的电源借电工作,一般会安装在车辆保险的位置附近,方向盘底部、副驾驶侧面、主驾驶座位底部、机器盖底部、后备箱两侧等;
一般会在这些位置,仔细查找一下吧,或者到汽车修理处找经验丰富的维修师傅帮忙查找。